His video titles are often clickbait, but on the whole I enjoy his content.
ICYMI - They just drove downslope to a field full of small white (light toned) rocks :)
His video titles are often clickbait, but on the whole I enjoy his content.
ICYMI - They just drove downslope to a field full of small white (light toned) rocks :)
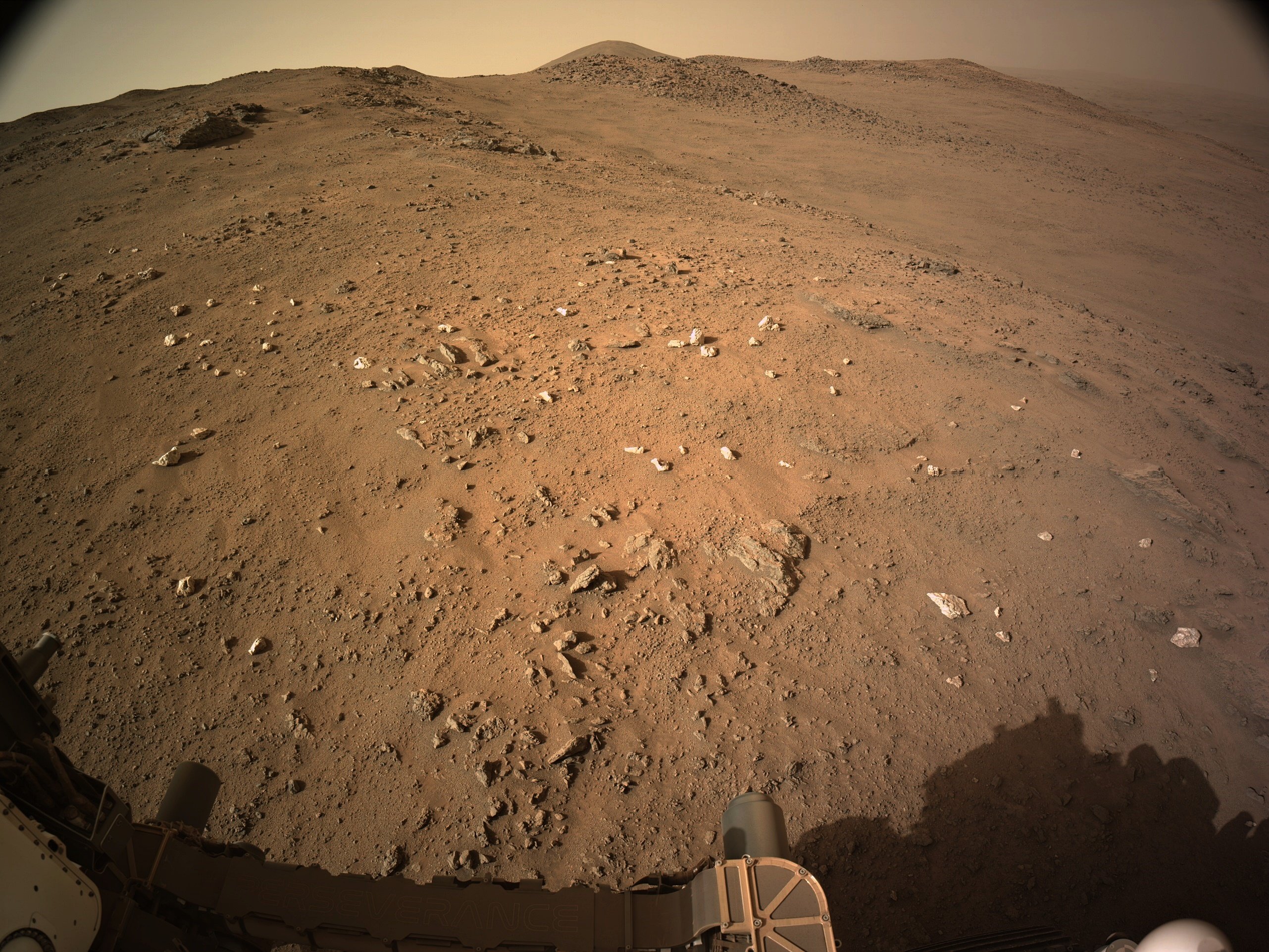
Sol 1131 - end-of-drive 4-tile processed NavCam at site 91-1928 (October 27, 2024
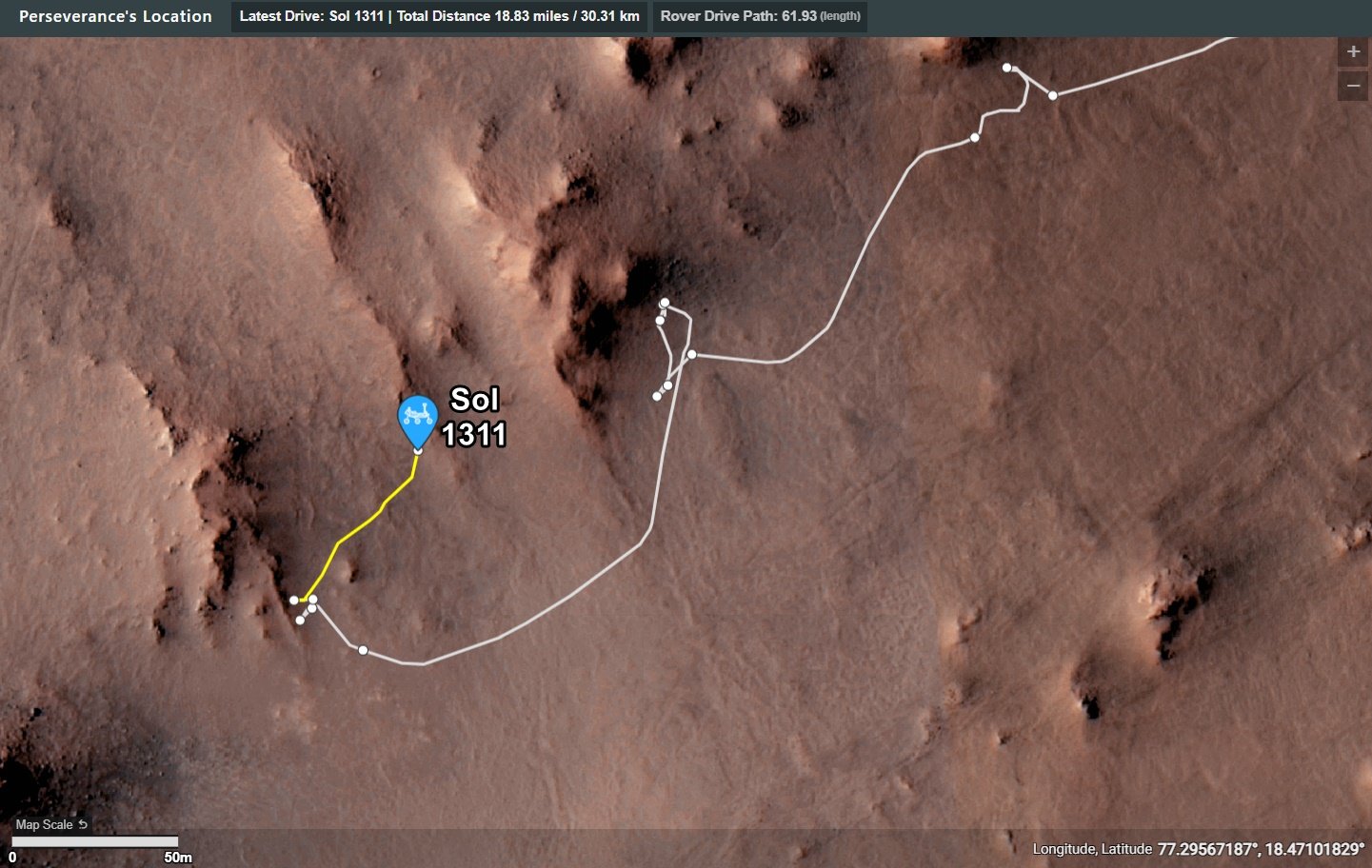
Still waiting for the official data, but it looks to be close to 50 meters Northeast of its position on sol 1308
R-MastCam-Z at full zoom (110mm) images a craggy rock face of Pico Turquino
The distance the rock face from the rover is approximately to 130 meters / 427 feet
Pico Turquino is one of the science waypoints on the notional path to the summit of the crater rim.
The rim was of Jezero crater is seen in the background (approximately 1.4 km / 0.87 miles from the rover.
The difference between the current elevation of the rover and the crater rim at that location is approximately 250 meters / 820 feet
The upper part of the Pico Turquino butte stands about 25 meters / 82 feet above the base of its scree slope
Perseverance rover acquired this image using its Right Mastcam-Z camera. Mastcam-Z is a pair of cameras located high on the rover's mast.
This image was acquired on October 25, 2024 (Sol 1309) at the local mean solar time of 09:33:48.
Processed using PhotoScape
Image Credit: NASA/JPL-Caltech/ASU/MSSS

I've not had the pleasure of visiting any of those analog locations, but I have thoroughly enjoyed visiting a few of the remote deserts in the middle East in my working years. Granted I was there for work, but did get to explore / enjoy the places during downtime :) I'm with you regarding the need to be sure of the environment before we put boots on the Martian surface, but that could have been done years ago, even decades ago. The 60's was an amazing time to witness what was being achieved. Hopefully there will be a similar period in the future. Time will tell.
Are we really passing up all those tasty-textured boulders on the hill??
It's certainly looking that way. I've wanted boots on the ground since the Apollo missions were completed. Certainly not going to happen in what's left before they nail down my pine lid. That's for the younger one's to experience...
'Pico Torquino' is ~200 meters WSW, it's one of the science waypoints identified by JPL in the crater rim campaign.
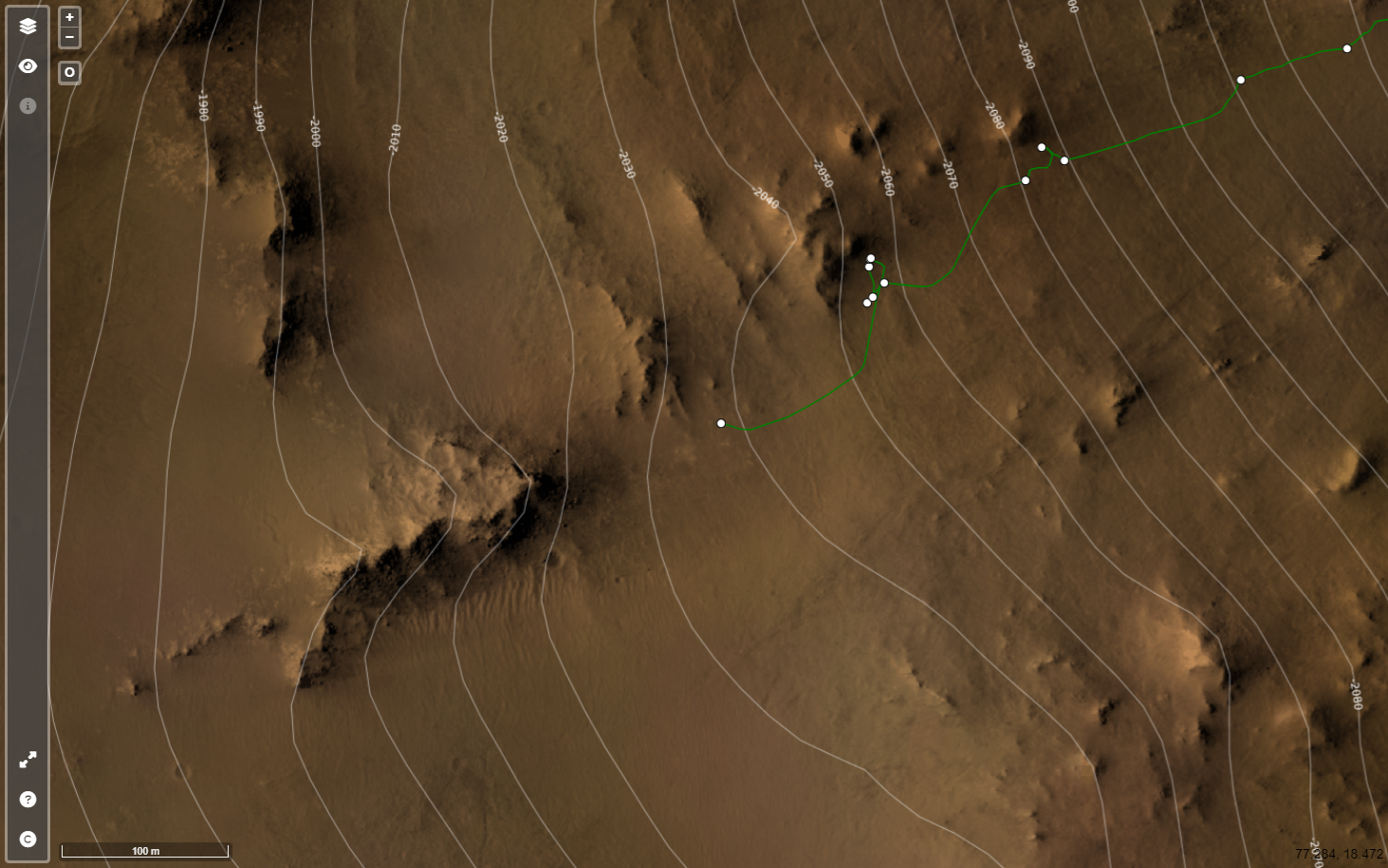
Image credits: HRSC: ESA/DLR/FU-BERLIN, CC BY-SA 3.0 IGO CTX: NASA/JPL-Caltech/MSSS HiRISE: NASA/JPL/University of Arizona
Screen capture from JPL's online map
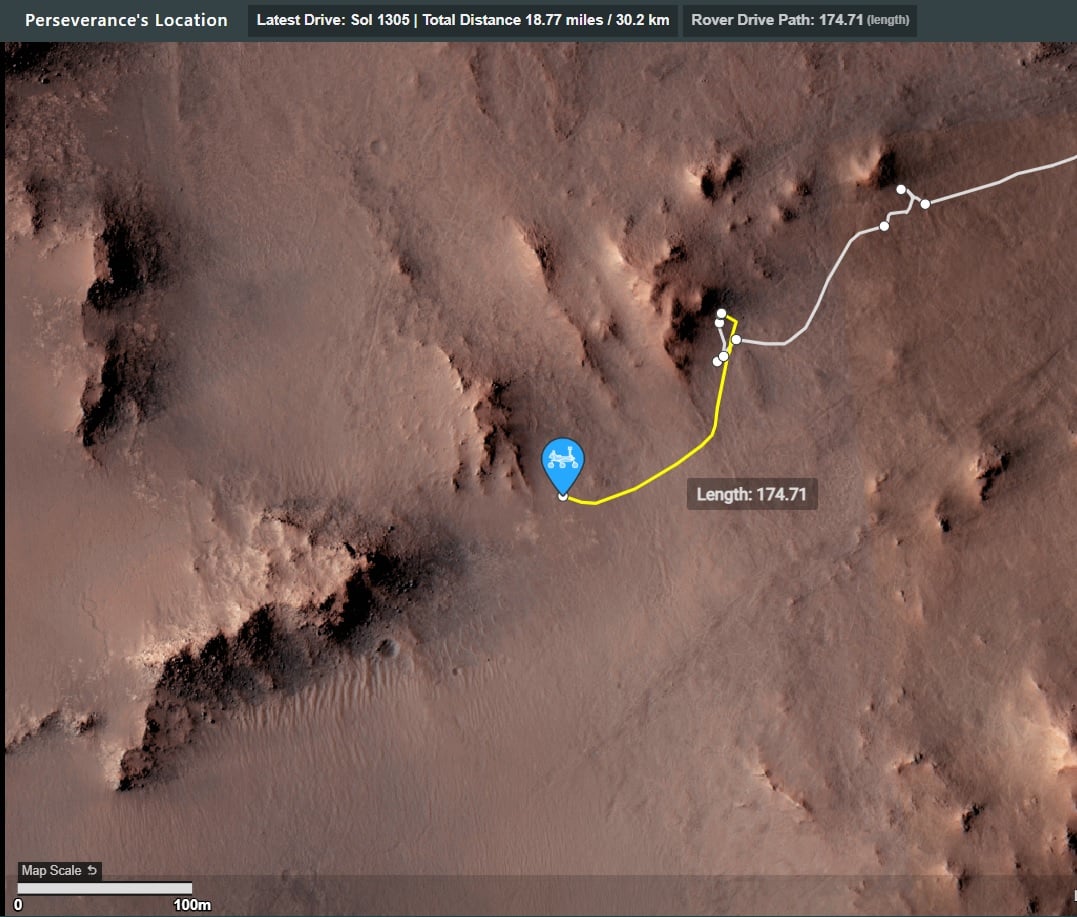
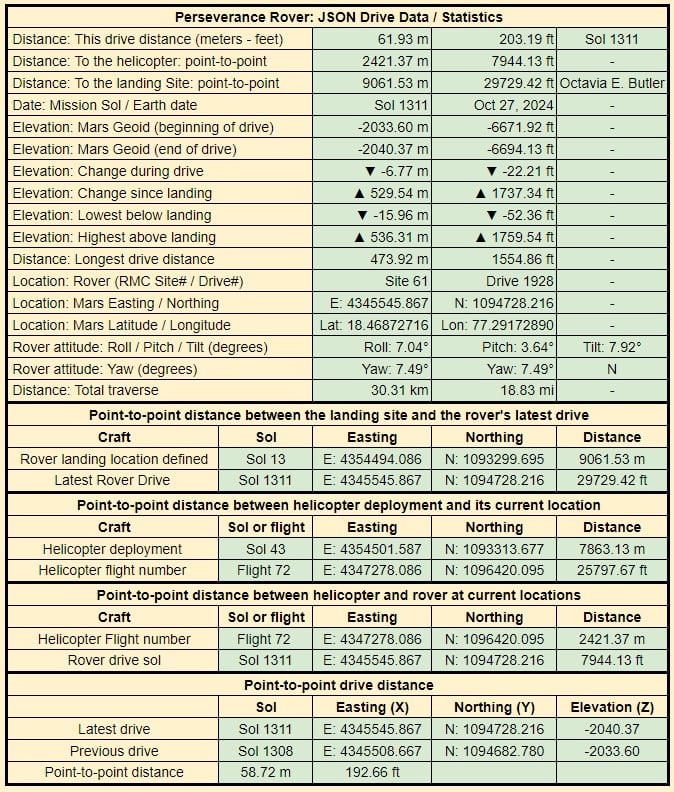
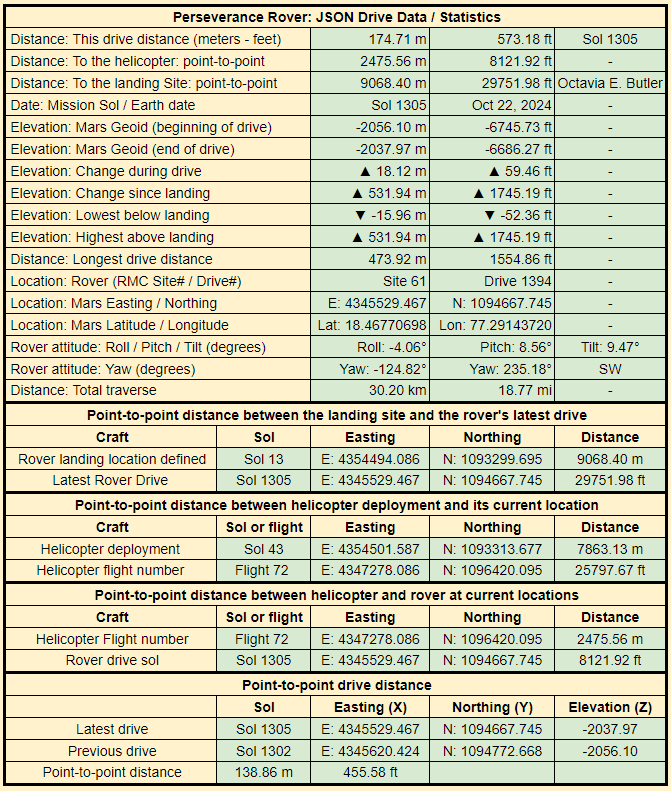
Data from JPL's JSON feeds
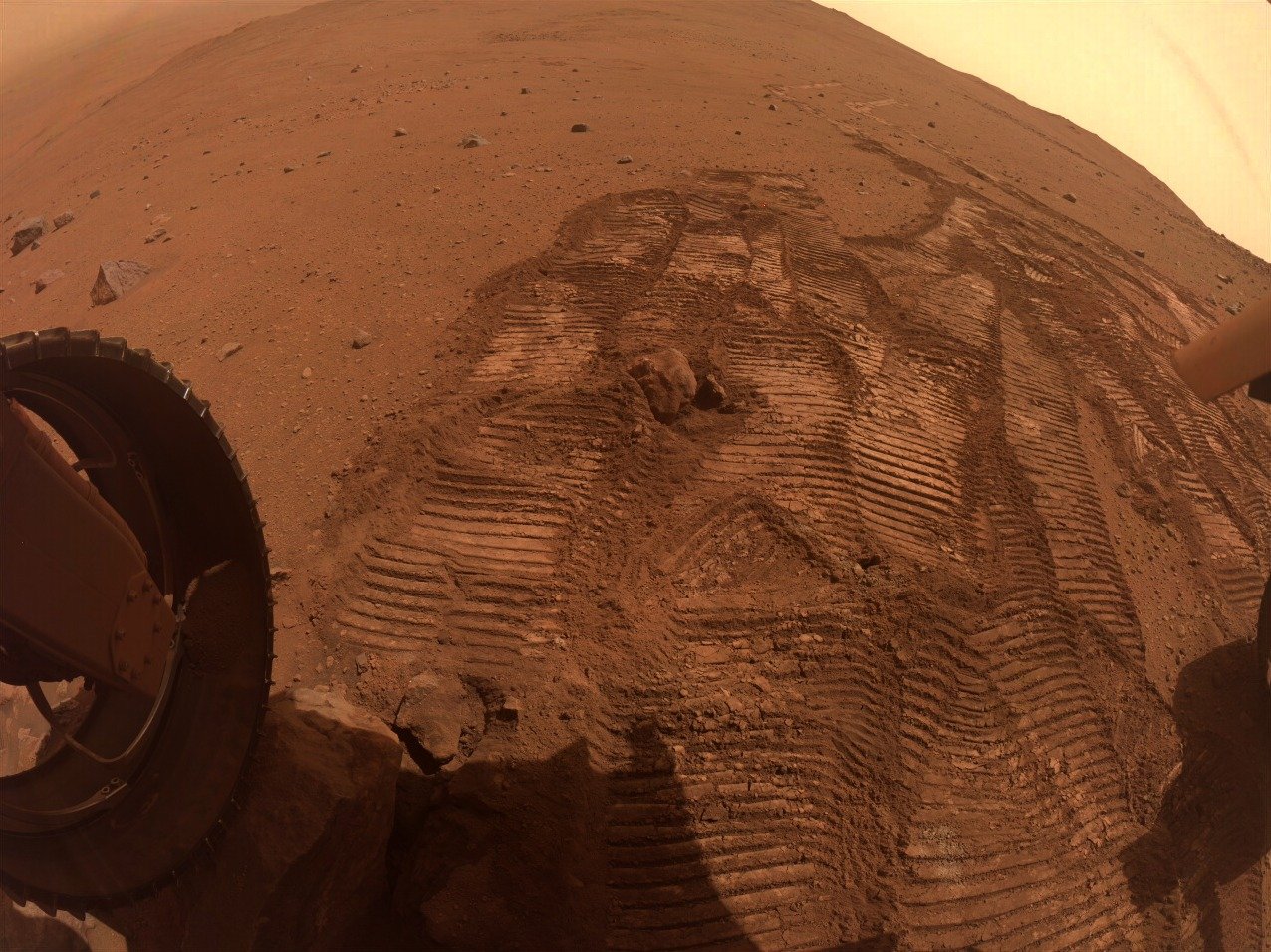
Drive Direction ~WSW 4-tile end-of-drive NavCam NASA/JPL-Caltech

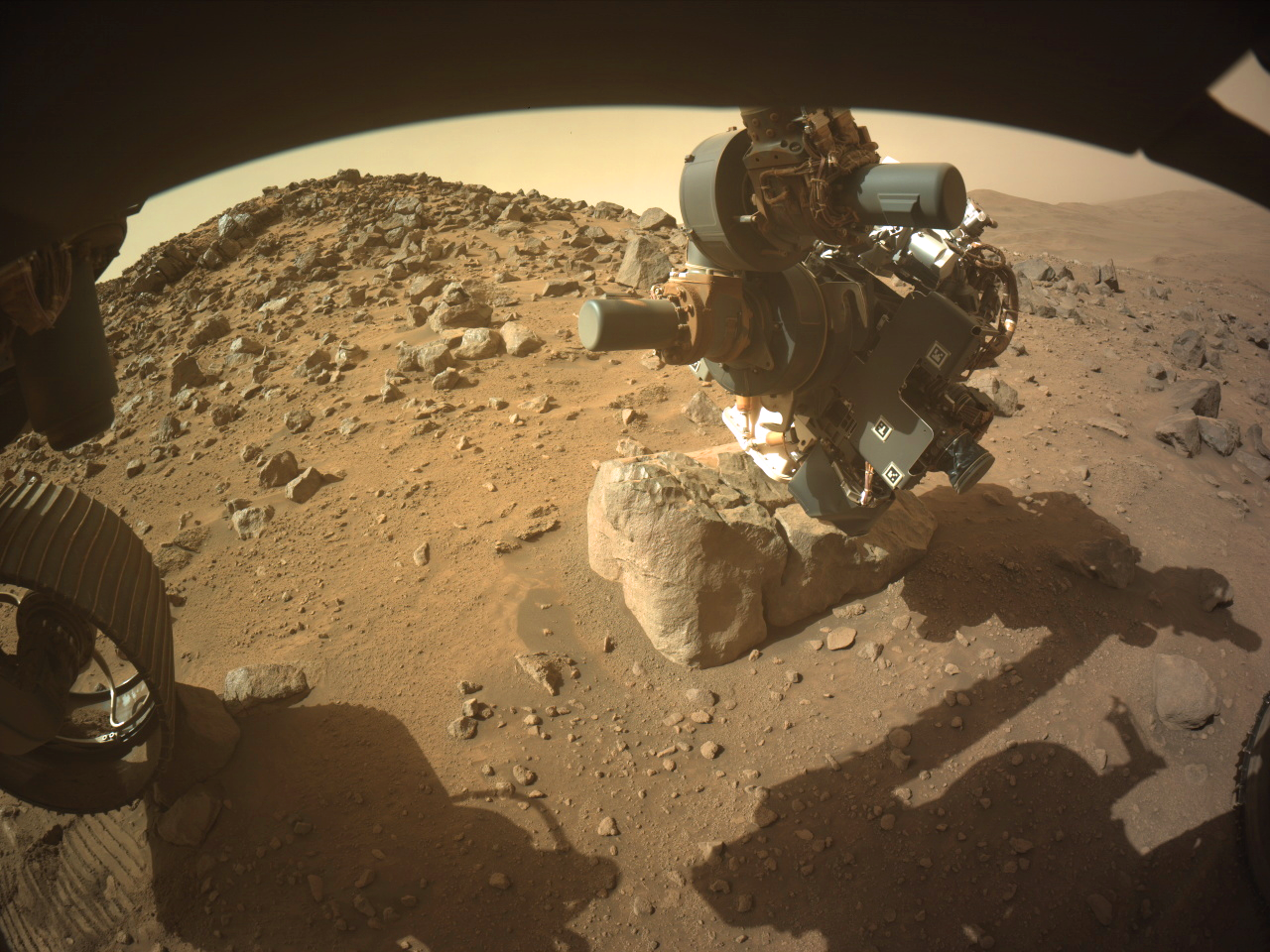
Despite one of the front wheels and the diagonally opposite rear wheel being perched on rocks they commanded the robotic arm to acquire close up images (WATSON) of the surface of this small boulder.
They were probably confident that the rover would not slip. In the past, the use of the arm to obtain close-ups using the turret mounted cameras have meant a delay as the rover was repositioned to firm ground, as s slip could damage the rover.
This image is from the front-left HazCam
NASA/JPL-Caltech
It looks like it has been polished by eons of wind blown dust particles
Nicely done, I preferred the older JPL mission traverse maps as used on the early years of the MSL mission, as each waypoint and some of the larger features were labeled. I can only assume that the new style interactive maps can not cope with that level of detail.
Look close - You'll see one of the rear wheels perched on a rock.
They will likely not perform any arm work in this state.
NASA/JPL-Caltech/James Sorenson
Apologies for the stitching errors (upper right of the slope) MS-ICE didn't do a great job this time, and I missed it before sharing
You mean “notional path to the SSW”, Paul, no?
They chose North on 1301 :) see https://mars.nasa.gov/maps/location/?mission=M20
Not quite the place I was thinking of, but we have a good selection of targets for arm work :)
My bad, SSW... Fat fingers 😮
This is a 4-tile end-of-drive NavCam. The rear of the rover is pointing NE. Assembled in MS-ICE - Credits: NASA/JPL-Caltech
Can mean a lot of things, sometimes they could be metamorphic rocks. Basically they are interesting because this rover has not conducted any contact science on a white rock since arriving in Jezero crater. Only once they've completed an investigation will we know what type it is